






大家好,今天分享一下机械手存储器异常解决办法
处理方法:
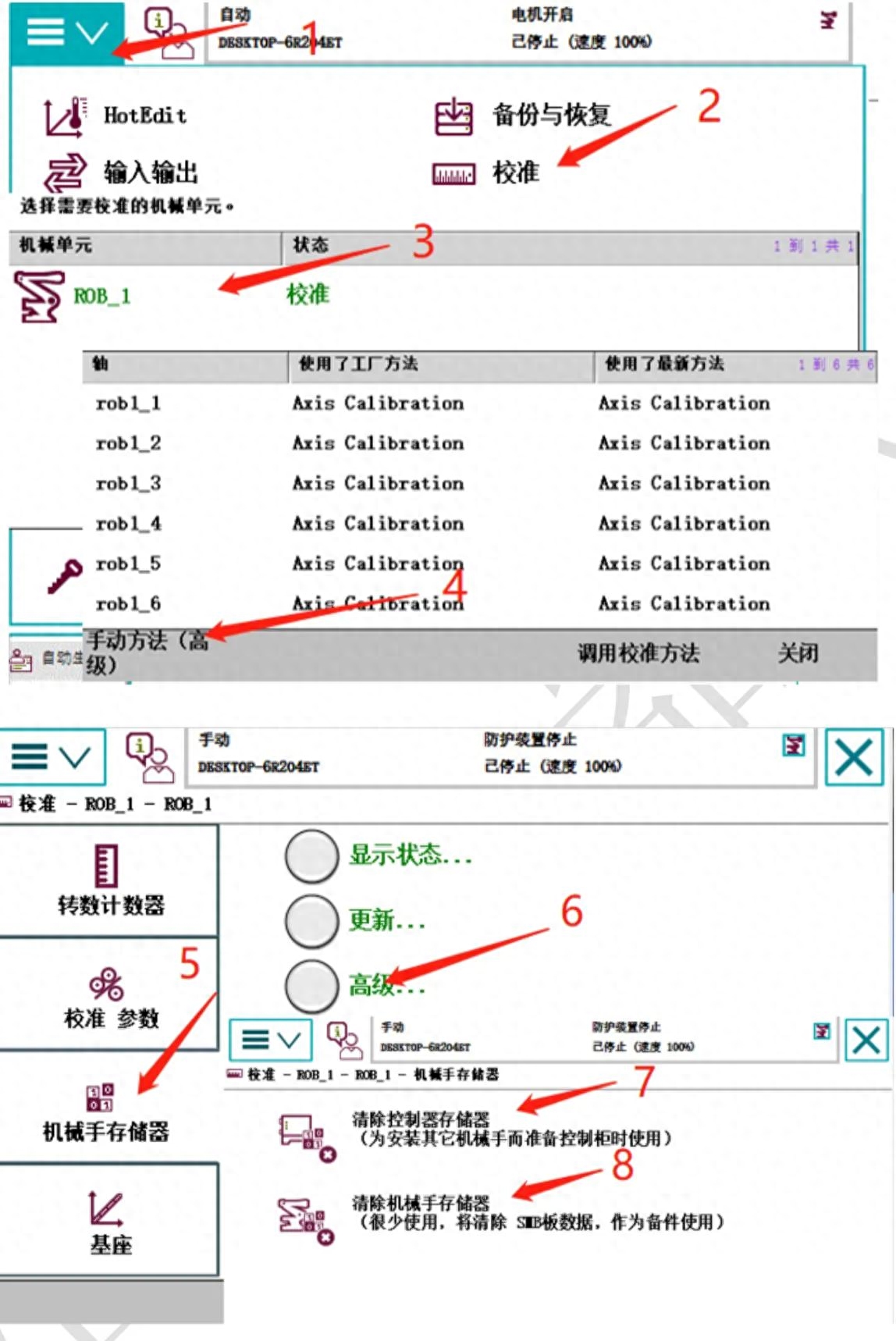
1:清除机器人内部原有内存 依次点击ABB---校准---SMB内存---高级---Rob1,进入“控制柜内存和SMB内存管理界面”依次清除控制柜内存和SMB内存。(附图)
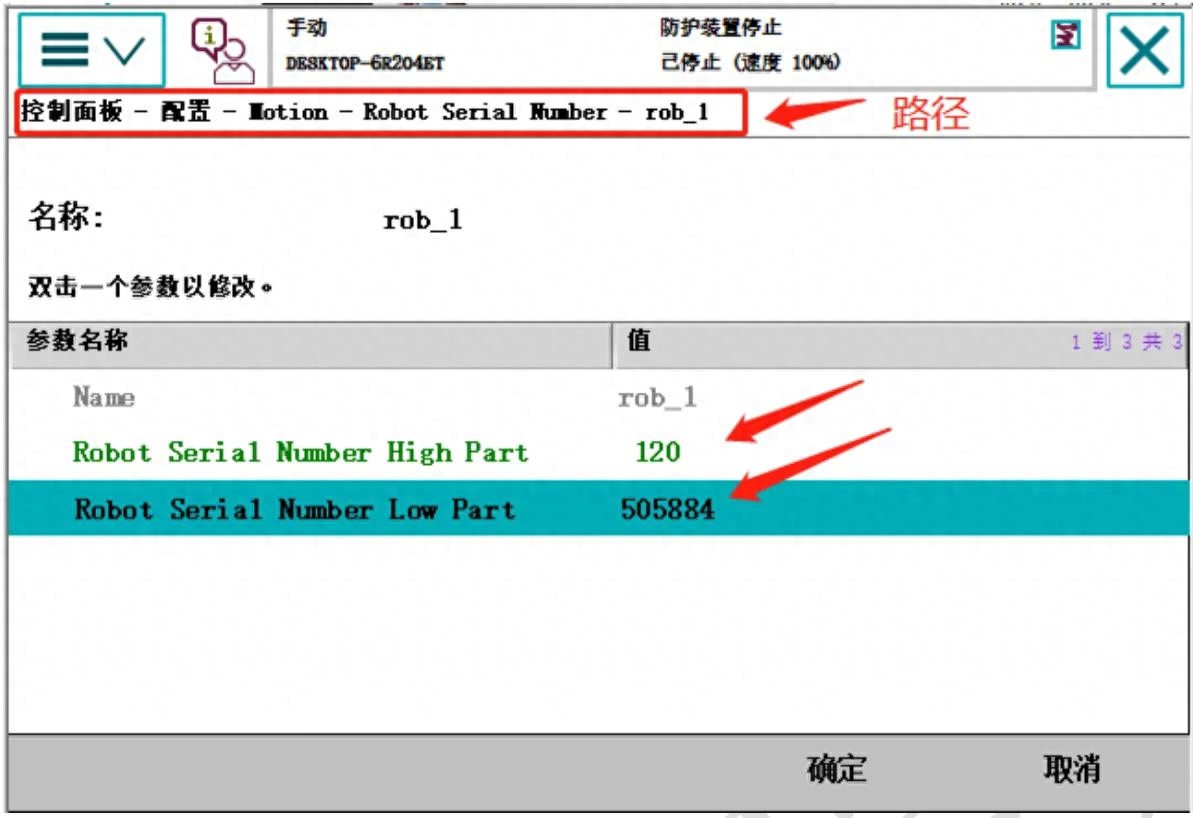
2:机器人序列号写入,以120-505884为例,依次点击:ABB--控制面板---配置---主题---Motion---Robot Serial Number---rob-1,进入“机器人序列号管理界面”分别在“robot serial number high part”写入“120”,在“robot serial number low part”写入“505884”,输入完毕后请重新启动机器人。(附图)
3:电机校准偏移值写入依次点击:ABB---校准---校准参数---编辑电机校准偏移值,分别将机器人手臂后面的标签上的数字写入示教器,写入完毕后重新启动机器人。

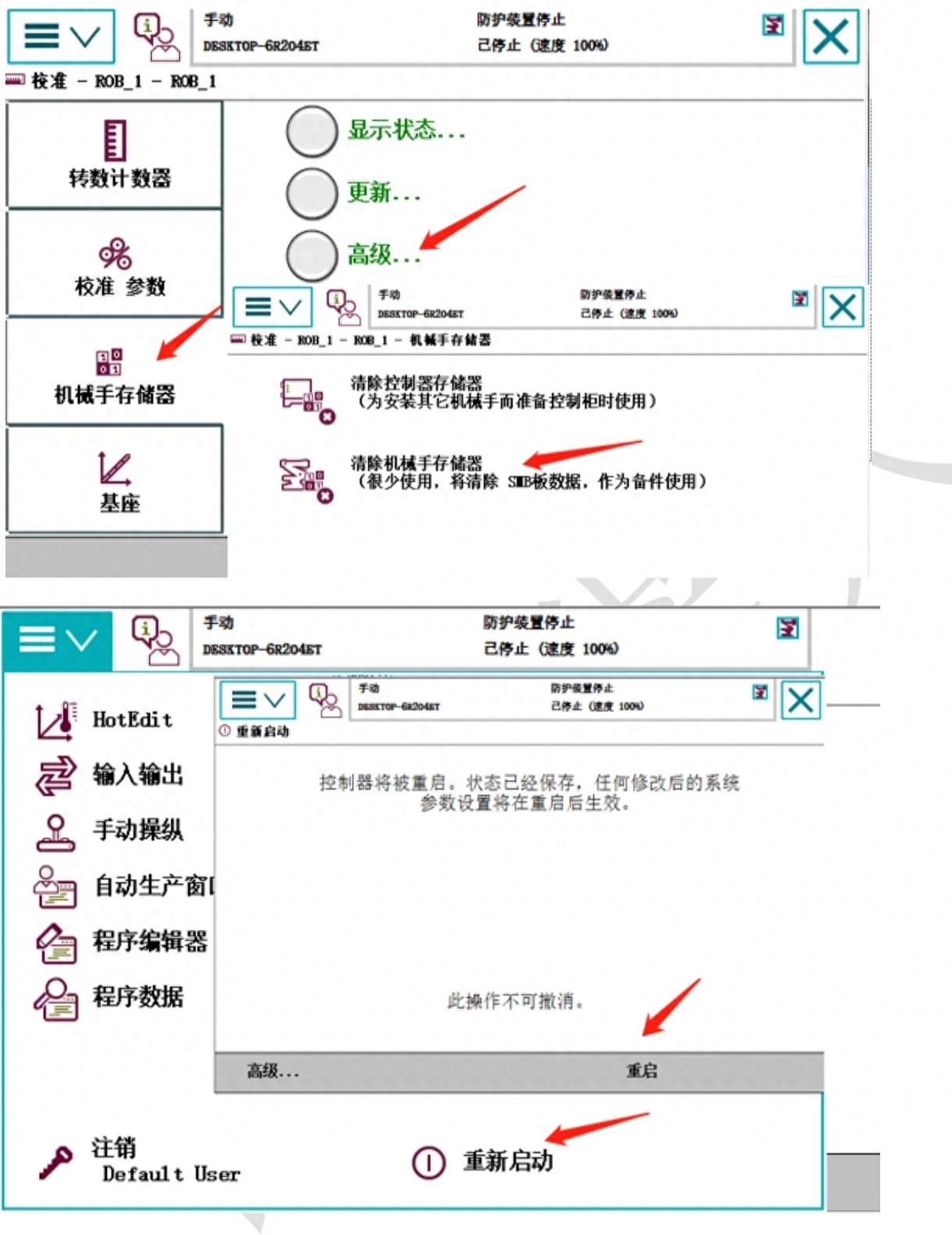
4:控制柜内存与SMB内存依次点击:ABB---校准---SMB内存---高级---Rob1,进入“控制柜内存和SMB内存管理界面”,只清除 SMB 内存依次点击:ABB---校准---SMB内存---更新---Rob1,进入“控制柜内存和SMB内存更新界面”点击“替换 SMB电路板”更新完毕后重新启动机器人。(附图)
5:重新更新机器人转数计数器,对各轴标零。
以上是ABB机器人存储器异常报警处理办法,希望对大家有用,欢迎大家转载,评论,交流